





금연뱅크 앱을 처음 소개한 지 시간이 꽤 지났습니다.
(이전 글: 금연뱅크 - 금연 기록 & 금연코인 앱 개발)
그동안 사용자 피드백을 반영해 앱을 크게 개편했고,
Android·iPhone **정식 출시(v1.1.4)**까지 마쳤습니다.
이번 글에서는 지금 버전의 금연뱅크가 어떤 앱인지,
왜 써볼 만한지 정리해 봅니다.
💡 한 줄 요약
금연 일수·절약 금액을 기록하고, 흡연·욕구 패턴을 분석해 맞춤 알림을 보내주며,
금연방에서 함께 응원하는 무료 금연 앱입니다.
📱 앱 다운로드 (무료)
링크
| Android | Google Play - 금연뱅크 |
| iPhone | App Store - 금연뱅크 |
| 홈페이지 | **https://www.nonsmokingbank.com/** |
왜 다시 만들었나요?
금연은 완벽하게 성공하기보다, 실패해도 다시 이어가는 것이 더 현실적이라고 생각했습니다.
그래서 이번 버전은 이런 방향으로 바꿨습니다.
- ✅ 기록 → 패턴 → 알림 : 언제 힘든지 데이터로 파악
- ✅ 혼자가 아닌 함께 : 금연방·담타시간으로 응원
- ✅ 위기 순간 대응 : 「못참겠어요」 3분 미션
- ✅ 눈에 보이는 성과 : 일수·절약·캘린더·레포트
예전 글에서 소개했던 코인·컬렉션 중심 구조에서 벗어나,
실제 금연에 도움이 되는 기능에 집중했습니다.
① 금연 일수·절약 금액, 홈에서 한눈에

금연뱅크 홈 - 금연 일수와 절약 금액 대시보드
앱을 켜면 금연 N일째, 아낀 돈, 참은 개비, 목표 진행률을 바로 확인할 수 있습니다.
- 시작일 기준 실시간 금연 시간 (일·시간·분·초)
- 하루 담배값·개비 수 설정 → 절약 금액 자동 계산
- 365일 등 목표 설정 및 진행률 표시
- 나의 금연 이유를 적어 두면, 힘들 때 다시 볼 수 있어요
흡연 기록이 있어도 「다시 이어가면 돼요」 —
실패를 숨기지 않고, 다시 시작하는 금연을 응원하는 방식입니다.
② 흡연·욕구 기록 → 나만의 패턴 알림

금연뱅크 - 흡연 욕구 기록과 맞춤 패턴 알림
「흡연했어요」「욕구가 올라요」 버튼으로 오늘의 기록을 남기면,
앱이 시간대·상황·감정 패턴을 분석합니다.
- 최근 30일 기록 3건 이상 → 맞춤 시간대 알림 1슬롯
- 「이 시간대, 조심!」 예방 알림으로 미리 대비
- 절약 시뮬레이션으로 1개월·1년 뒤 아낄 돈도 확인
기록할수록 알림이 나에게 맞게 바뀝니다.
③ 참기 힘들 때, 3분 미션

금연뱅크 - 못참겠어요 3분 미션
갑자기 담배가 생각날 때 「못참겠어요」 버튼을 누르면
3분 타이머 + 미션이 시작됩니다.
- 「찬물로 세수하기」 같은 즉시 실행 미션
- 나의 금연 이유 다시 보기
- 방 알리기 — 금연방 멤버에게 SOS
- 게임하기 — 집중 전환
- 결국 피웠다면 솔직하게 기록 (패턴 분석에 반영)
욕구는 보통 몇 분 지나면 약해집니다.
그 3분을 버티도록 돕는 기능입니다.
④ 혼자가 아닌, 함께하는 금연방

금연뱅크 - 솔로·그룹 금연방과 담타시간
금연방 탭에서 혼자 또는 함께 금연할 수 있습니다.
종류설명
| 솔로방 | 나만의 금연 다짐·기록 |
| 그룹방 | 초대코드로 친구·가족과 함께 |
| 담타시간 | 모든 사용자가 모이는 공용 응원 공간 |
「다같이 금연!」처럼 그룹으로 일수·응원을 나누면
혼자보다 훨씬 오래 갑니다.
⑤ 매일 채우는 금연 캘린더

금연뱅크 - 금연 캘린더와 연속 금연 스트릭
금연 캘린더에서 날짜별 성공·흡연을 색으로 표시합니다.
- 🟢 금연 성공 / 🔴 흡연함 / ⚪ 미기록
- 연속 금연 일수(스트릭) · 이달 성공 일수
- 매일 기록 → 패턴 파악에 연결
달력을 채워 가는 재미, 꽤 큰 동기부여가 됩니다.
⑥ 나만의 흡연·욕구 패턴 레포트
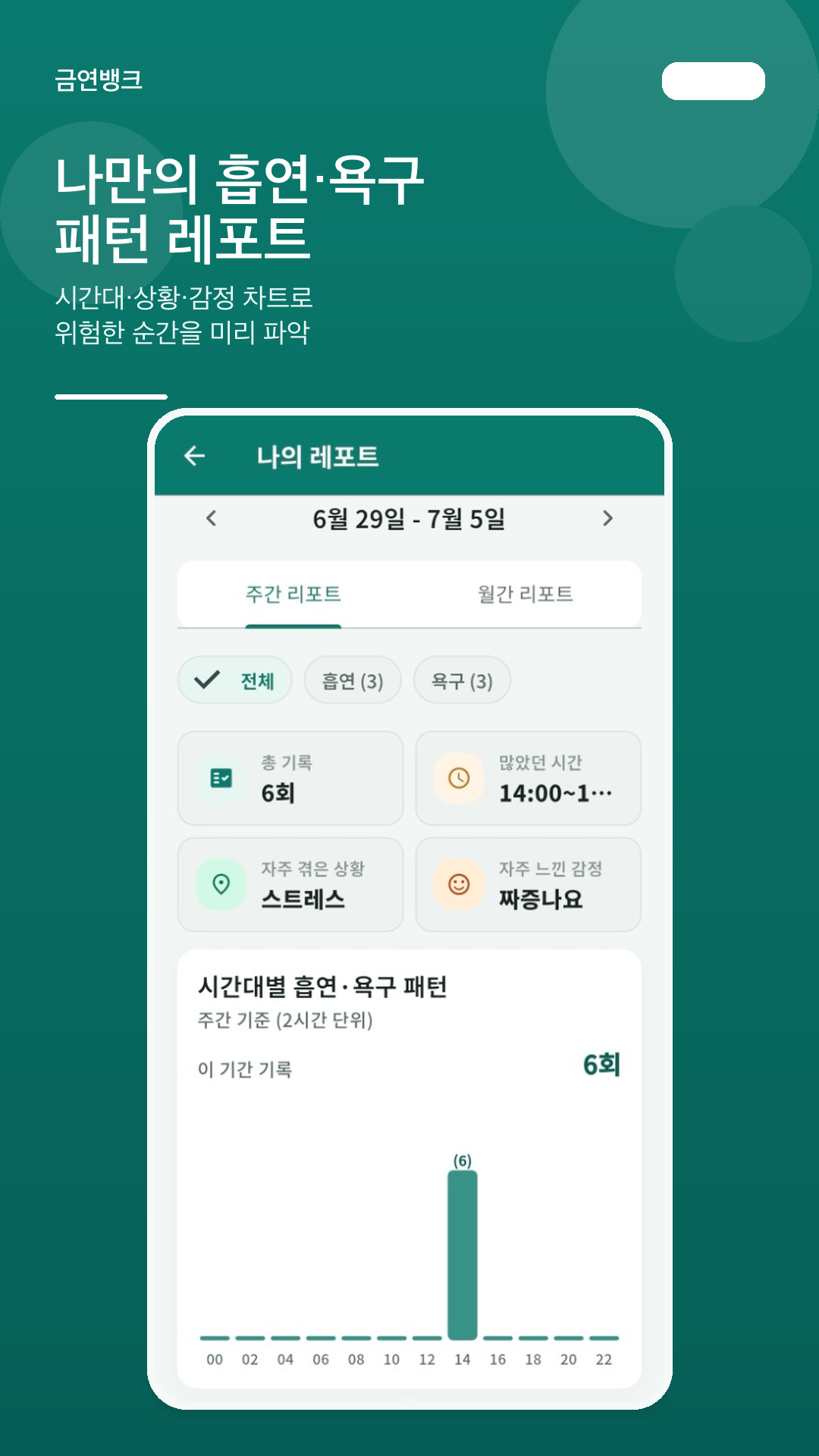
금연뱅크 - 주간·월간 패턴 레포트
더보기 → 레포트에서 주간·월간 분석을 볼 수 있습니다.
- 가장 많은 시간대 (예: 14시)
- 자주 겪는 상황 (예: 스트레스)
- 자주 느끼는 감정 (예: 짜증)
- 시간대별 차트로 위험한 순간 한눈에
「왜 자꾸 실패하지?」 → 언제, 왜 힘든지 데이터로 알 수 있습니다.
⑦ 응원과 기록을 나누는 금연방 채팅

금연뱅크 - 금연방 채팅과 사진 공유
금연방 안에서 메시지·사진으로 오늘의 금연을 공유할 수 있습니다.
- 「금연중입니다!!」 인증
- 사진과 함께 오늘의 기록 남기기
- 멤버끼리 서로 응원
카카오톡 오픈채팅과 함께 쓰면 더 좋습니다.
(개발자방 오픈채팅도 운영 중 — 피드백·버그 제보 환영!)
이런 분께 추천해요
- 금연 N일차, 조금만 더 버티고 싶을 때
- 언제 담배가 생각나는지 알고 싶을 때
- 절약 금액을 눈으로 확인하며 동기를 얻고 싶을 때
- 혼자보다 같이 응원하며 끊고 싶을 때
- 실패해도 다시 이어가는 금연을 원할 때
버그·기능 제안·UX 피드백은 댓글이나 cjw207207@gmail.com으로 보내주시면
다음 업데이트에 반영하겠습니다.
앱 개발 과정, 기술 스택, 배포 경험 등 별도 개발 후기도 원하시면
댓글로 알려주세요. 글로 정리해 보겠습니다.
마무리
금연은 쉽지 않습니다.
그래서 기록하고, 패턴을 알고, 함께 버티는 것 —
금연뱅크가 그걸 돕도록 만들어졌습니다.
한 번 설치해 보시고,
쓰시다 불편한 점·바라는 기능이 있으면 편하게 알려주세요.
실패해도 괜찮아요. 다시 이어가면 됩니다. 🌿
📱 지금 다운로드
- Android: Google Play
- iPhone: App Store
- 홈페이지: **https://www.nonsmokingbank.com/**
많은 이용과 피드백 부탁드립니다! 🙏
'공지' 카테고리의 다른 글
| 금연뱅크 - 금연 기록 & 금연코인(출석/보상) 앱 개발 (0) | 2026.03.25 |
|---|---|
| 개발자를 꿈꾸는 프로그래머 (0) | 2018.11.21 |
| 리뉴얼 (0) | 2017.01.02 |
| 오랜만의 공지.! (0) | 2016.06.10 |
| Breaktime... (0) | 2016.05.10 |
WRITTEN BY





















































