





지난번 드론의 정의(https://jwprogramming.tistory.com/282)를 다루었습니다.
오늘은 드론의 구성요소와 주요 용어 및 통신방식 등에 대해 간단히 정리해보았습니다.
1) 드론 구성요소
출처 : 드론의 구성, http://www.sigmapress.co.kr/shop/shop_image/g47841_1550542236.pdf
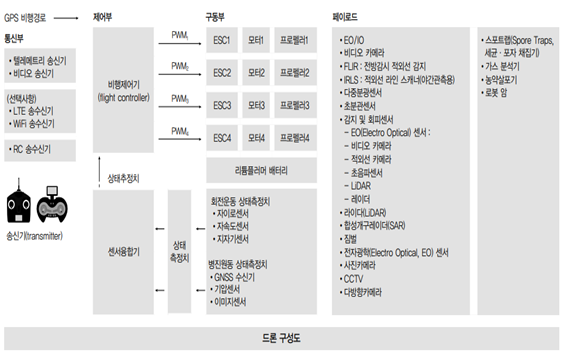
드론의 구조는 드론과 지상의 원격조정자가 각종 데이터를 주고받는 ‘통신부’, 드론의 비행을 조정하는 ‘제어부’, 드론을 날아가게 구동시키는 ‘구동부’, 그리고 카메라 등 각종 탑재 장비들로 구성된 ‘페이로드’의 네 부분으로 나뉜다고 볼 수 있습니다.
※ LTE, WIFI 등 드론 통신방식에 따라 통신부(송신기)에서 제어부(비행제어기)로 위치데이터 등이 이동되고, 제어부의 센서융합기를 통해 자이로센서, 지자기 센서 등 센서값에 대한 측정치를 갖고 있습니다. 이를 비행제어기를 통해 실제 구동부(모터, 프로펠러 등)으로 핀을 통해 데이터를 전달합니다.
[드론 HW 구성]
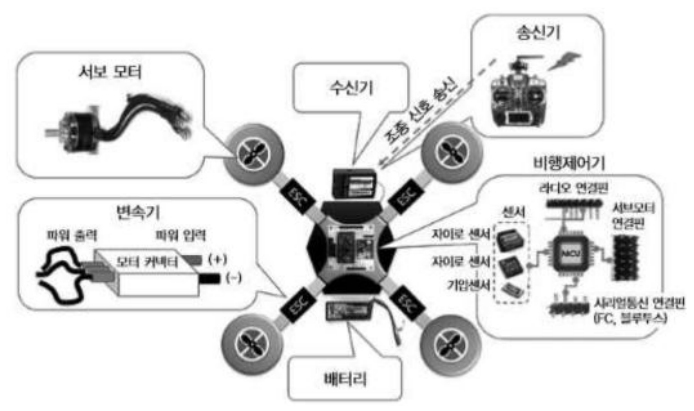
출처 : 드론의 구성, http://www.sigmapress.co.kr/shop/shop_image/g47841_1550542236.pdf
[드론 서비스 구성]
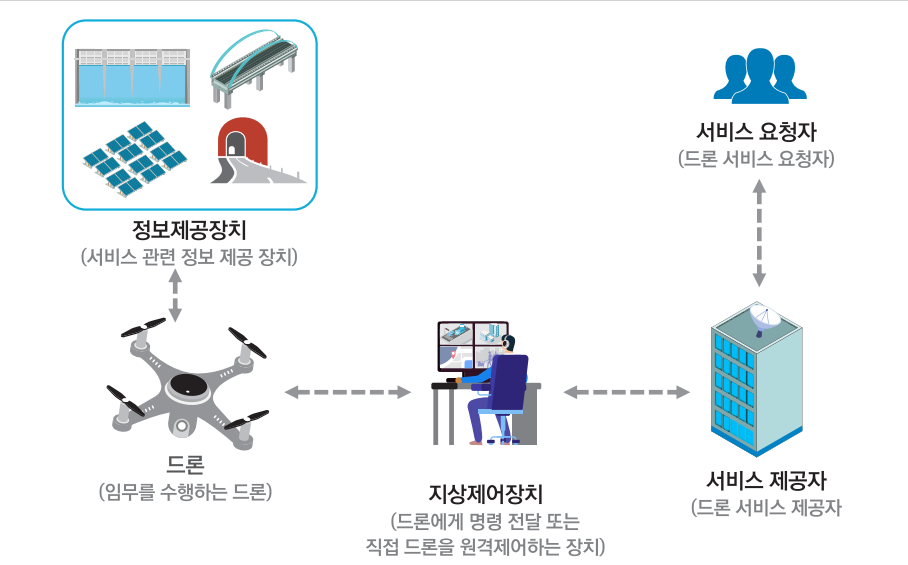
출처 : KISA, 드론 사이버보안 가이드 https://www.kisa.or.kr/2060205/form?postSeq=9&page=1#fnPostAttachDownload
2) 드론 관련 주요 용어
1. GCS(Ground Control System) : (지상관제 시스템)
- 자율비행 및 실시간 비행경로 변경 관제 가능
- 지도 데이터 처리, 비행경로 사전 분석 기능
- 지오펜스 기능 (필요 시 비행금지 지역 생성)
2. FC(flight controller, FC) : 비행제어장치
: 수신기(Rx Module)에서 받은 조종신호를 변속기(ESC: 모터의 속도를 제어해주는 장치)로 보내주는 중간에 안정적인 비행을 위해 신호를 조종해주는 장치
3. FCC(Flight Control Computer) : 비행제어장치
: 각종 데이터를 취합하여 위치, 자세 제어
4. FCS(Flight Control System) : 비행제어시스템
- FCS는 위치, 자세 제어, 경로비행 제어 등에 필요한 드론 설계 핵심기술
- 핵심 모듈 (AHRS, FC) 자체 설계가능
- 제어기 커스터마이징, 비행 로그 추적 및 분석가능
5. AHRS : 관성측정장치 (Attitude and heading reference system)
: 기체의 상태 데이터 (자세,고도, 방향등)계산
6. RTH(Return to home) : 자동복귀
7. GNSS(Global Navigation Satellite System)
: 우주궤도를 돌고 있는 인공위성에 발신하는 전파를 이용해 지구 전역에서 움직이는 물체의 위치·고도치·속도를 계산하는 위성항법 시스템
8. ESC(electronic speed control) : (변속기)
: 전기적으로 속도를 제어하는 소자
- 브러쉬리스 모터를 구동하기 위해 필요한 전자회로
- FC의 명령을 받아서 모터 속도를 제어함
9. PWM(Pulse Width Modulation) : 신호 폭 조종
: 일정한 주기 내에서 Duty 비를 변화 시켜서 평균전압을 제어하는 방법
※ 드론 로터의 회전수는 일반적으로 PWM(Pulse Width Modulation) 방식으로 제어되고 회전수의 차이에 따라 상하(Throttle), 전후진(Pitch), 좌우이동(Roll) 및 제자리 회전(Yaw) 동작이 이루어집니다.
2-1) 드론 탑재센서
1) 자동비행제어장치
: 자동비행제어장치(Automatic Flight Control System)란 항공기나 미사일의 내부와 외부 장치에 의해 진로나 비행 자세를 자동적으로 조정할 수 있는 모든 장비를 포괄한 장치
※ 비행제어장치(flight controller, FC)
: 수신기(Rx Module)에서 받은 조종신호를 변속기(ESC: 모터의 속도를 제어해주는 장치)로 보내주는 중간에 안정적인 비행을 위해 신호를 조종해주는 장치
(FC의 세부역할)
- 수신기의 신호를 분석할 수 있도록 적당한 채널로 나눔
- 정착된 센서에서 감지된 신호를 분석하여 멀티콥터가 안정적인 자세를 유지하도록 변속기(ESC)에 신호를 보냄
- 수신기로 수신된 신호와 센서에서 수신된 정보, 두 신호를 분석하여 원하는 비행이 가능하도록 변속기(ESC)에 신호를 보냄
2) 모터
: 드론에서 사용하는 모터는 일반적으로 브러시(Brushed Direct Current, BDC)모터와 브러시리스 직류(Brushless Direct Current, BLDC) 모터로 나뉨
| BDC 모터 | BLDC 모터 |
| BDC 모터는 주로 완구용 드론에 사용됨장점 : 가격이 싸고, 구동방식이 간단단점 : 브러시가 닳게 되면 수명이 다하고, 스파크, 열 등이 발생해 모터의 고속회전 및 장시간 회전에는 적합하지 않음 | BLDC 모터는 영구 자석으로 된 중심부의 회전자(Rotor)와 권선(Wire)으로 되어 있는 극(Pole)과 고정자(Stator)들로 구성 |
3) 가속도계와 자이로스코프
: 가속도계와 자이로(Gyro) 센서는 드론의 관성 센서이다. 가속도계는 가속도를 측정하고, 자이로는 회전력을 측정
4) 자력계
: 자력계(magnetometer)는 나침반 기능을 하는 센서로 자기장을 측정하는 역할
(자력계가 자북을 측정하여 드론의 방향정보를 드론의 비행제어장치(FC)로 보내 이를 보강하는 역할)
※ 자력계 센서는 전선, 모터, 변속기(ESC) 등에서 발생하는 주변 자기장에 매우 민감합니다. GPS 모듈은 일반적으로 이런 장비들과 떨어져 있기 때문에, 장비들에 의한 자기장 간섭을 피하기 위해 나침반 센서를 추가적으로 GPS 모듈에 장착하기도 합니다.
5) 관성측정장치
: 관성측정장치(Inertial Measurement Unit, IMU)는 GPS와 연동되어 기체의 이동방향, 이동경로, 이동속도를 유지하는 역할을 하고, 3축 자력계와 GPS 수신기가 결합된 형태로 얻은 정보를 드론의 비행제어장치(FC)로 전달합니다.
6) 기압계
: 기압계는 항공기의 고도를 측정하기 위한 압력 센서대기압은 해수면에서의 높이에 따라 결정되고, 기압계는 이 원리를 이용하여 대기압을 측정하여 고도를 측정
일반적으로는 GNSS 센서를 사용하여 고도를 매우 정밀하게 측정 할 수 있지만, GNSS를 사용할 수 없는 실내에서는 초음파나 이미지 센서 등을 사용하여 정밀하게 고도를 측정합니다.
7) 대기속도계
: 대기속도계는 비행 중 드론을 스쳐 지나가는 공기의 흐름속도를 측정하기 위한 것
8) 센서 융합
: 센서 융합(sensor fusion)이란 각종 외부 센서에서 오는 정보를 통합 또는 융합함으로써 새로운 정보를 얻는 것
9) 초음파 거리 센서
: 초음파 센서는 초음파를 발생하는 송신기 부분과 반사되어 돌아오는 초음파를 검출하는 수신기로 구성
※ 송신기에서 초음파를 발사한 후, 수신기에 반사된 초음파가 들어올 때까지의 시간을 측정하여 센서와 물체까지의 거리를 측정
10) 라이다 센서
: 라이다 센서는 레이저(laser)를 목표물(대상체)에 투사하고 대상체에서 반사되어 되돌아오는 시간을 측정함으로써 대상체까지의 거리, 방향, 속도, 온도, 물질 분포 및 농도 특성 등을 감지, 측정할 수 있는 기술- 자율비행 및 실시간 비행경로 변경 관제 가능
- 지도 데이터 처리, 비행경로 사전 분석 기능
- 지오펜스 기능 (필요 시 비행금지 지역 생성)
3) 통신기술
1. 무선통신 송수신기(telemetry)
: 무선통신 송수신기는 데이터를 송수신하기 위한 무선장비로서 드론과 조정기에 각각 탑재·설치해야 합니다.
※ 중요한 것은 드론과 조정기의 무선통신 송수신기를 서로 페어링해야 한다는 것
드론과 조정기와의 통신을 위해 기본적으로 2.4GHz 및 5.0GHz의 와이파이(WiFi)를 사용합니다. 그러나 통신범위가 5~7km를 넘지 못하기 때문에 장거리 이동 시에는 LTE망을 활용합니다.
---------------------------------------------------
국립전파연구원은 2015년 12월 31일‘항공업무용 무선설비 기술기준’을 개정해 드론 이용을 위한 전용 주파수를 할당했다. 이 기술기준에 따르면 드론 전용 주파수로 5,030~5,091MHz(5,030~5,091GHz) 대역(61MHz 폭)이 새롭게 할당되었습니다.
-> 드론과 조정기와의 통신은 2.4GHz, 5.0GHz. 혹은 전용주파수로 5.0MHz 근방의 대역을 사용하지만, GPS신호는 1.2GHz(혹은 1.5GHz)에서 사용됩니다.
즉 GPS신호를 수신할 때 다른 신호들과 중첩, 방해 등이 발생할 수 있으며 이때 GPS Spoofing 혹은 Jamming 등이 발생할 수 있지 않을까하는 의문을 가져봅니다.
---------------------------------------------------
2. 주파수 대역(RF)
드론은 지상에서 드론으로 원격조정(RC) 비행명령어 및 카메라 조작 등 페이로드 제어 신호를 전송하기 위한 상향링크(지상 → 드론)가 필요하고,
비디오, 사진 및 드론의 위치, 비행속도, 배터리 잔량 등의 비행정보를 지상으로 전송하기 위한 하향링크(드론 → 지상)가 필요합니다.
※ GPS 신호는 1.2GHz(혹은 1.5GHz) 주파수 대역으로 수신
[요약]
- 상향링크 : 지상에서 드론으로 페이로드 제어신호를 전송
- 하향링크 : 페이로드, 제어부 등에서 발생한 비행정보를 지상으로 전송
1) 900MHz 및 1.3GHz 주파수 대역
: 900MHz 주파수 대역은 비디오 및 텔레메트리 전송을 위한 하향링크로 사용
- 900MHz 대역은 최근 규격이 확정된 IoT(internet of things)용 WiFi 11ah 무선랜과도 주파수대역이 겹친다. 1.3GHz 주파수 대역 역시 비디오 전송을 위한 하향링크로 사용되는데, 2005년 이후에 쏘아 올린 GPS 위성의 1.2GHz L2 주파수 대역과 가까워서 드론에 탑재된 GPS 수신기에 간섭을 줄 수 있습니다.
2) 2.4GHz 및 5.8GHz 주파수 대역
: 2.4GHz 주파수 대역은 거의 모든 드론이 원격조정 및 페이로드 제어로 사용하는 상향링크입니다.
그러나 2.4GHz는 WiFi, 블루투스, 지그비 등과 주파수대역이 겹치므로 사람이 많이 모이는 공원 등의 지역에서는 드론 비행에 주의해야 합니다. 일부 드론들은 2.4GHz 대역을 비디오 전송 하향링크로 사용합니다. 이 경우, 원격조정 상향링크는 5.8GHz 주파수 대역을 이용합니다. 5.8GHz 주파수 대역은 최근 출시된 드론들이 비디오 및 텔레메트리 전송 하향링크로 사용하는 주파수 대역입니다.
3) WiFi 및 4G/3G
: 드론에 WiFi 수신기를 설치해 스마트폰 WiFi로 직접 드론을 원격조정할 수 있습니다. 드론에 LTE 혹은 WCDMA 송수신기를 설치해 이동통신 네트워크를 통해 스마트폰으로 드론을 원격조정하거나 드론의 비디오 데이터를 지상으로 전송하기도 합니다.
3. GNSS
1. GPS 및 GNSS(Global Navigation Satellite System : 위성항법시스템)
: GPS는 인공위성으로부터 수신기까지 신호가 도달하는 데 걸린 시간(소요시간)을 기준으로 거리를 측정합니다.
GNSS는 크게 1) 위성, 2) 지상의 제어국, 3) 사용자로 구성되어 있습니다. 지상 제어국의 수신장치에서 고도 약 20,000km 중궤도에 위치해 있는 인공위성에서 신호를 받아 수 m 이내의 위치정보를 알아낼 수 있는 것이 GNSS의 기본 원리입니다.

'ETC > Drone' 카테고리의 다른 글
| 1. 드론(Drone)의 정의. 드론이란 무엇인가? (0) | 2022.04.13 |
|---|
WRITTEN BY
